شکار در زیر آب با ربات زیردریایی خودکار
{kind=link}
دانشجویان آمریکایی سعی دارند یک ربات زیردریایی ارائه دهند که بدون کمک انسان، از عهده ردیابی و شکار ماهیها برآید.
دانشجویان "موسسه پلیتکنیک ورسستر"(WPI) آمریکا در تلاش هستند با طراحی یک ربات زیردریایی که قادر به شکار شیرماهی است، بر یکی از تهدیدات بزرگ محیط زیست غلبه کنند.
این ربات که با ترکیب پیکانهای شناور و یادگیری ماشینی ابداع شده، میتواند بدون نیاز به اپراتور انسان، شیرماهی را ردیابی و شکار کند.
شیرماهی یا خروسماهی، از ماهیان زهرآلود است و یکی از مشکلات بزرگ محیط زیست به شمار میرود. به گفته "اداره ملی اقیانوسی و جوی آمریکا" (NOAA)، در آبهای گرم کارائیب، باهاما و نواحی جنوب و سواحل شرقی آمریکا، بیش از یک میلیون شیرماهی وجود دارند. بومی نبودن شیرماهی و عدم وجود شکارچی آن در این مناطق، موجب افزایش جمعیت آن و بروز نگرانیهای زیست محیطی شده است.
مشکل اینجاست که شیرماهی، نه تنها اشتهای حریصانهای دارد و میتواند در هر پنج روز، 30 هزار ماهی بخورد، بلکه ظاهر بیگانهاش موجب میشود ماهیان بومی، آن را نادیده بگیرند و به راحتی طعمه او شوند.
تاکنون، سازمانهای بسیاری تلاش کردهاند برای شکار سادهتر شیرماهی، رباتهایی بسازند اما همه این رباتها برای شکار، به کمک یک اپراتور انسان نیاز دارند. در نتیجه، هدف دانشجویان "ورسستر" این است که سیستم رباتیک جدیدشان، به تنهایی از عهده شناسایی و از بین بردن شیرماهیها برآید.
این ربات برای شناسایی و شکار خودکار شیرماهی و فرستادن آن به سطح آب، طراحی شده است. در مرکز ربات، دو سیستم قرار دارند. یکی از آنها، یک پلتفرم هوش مصنوعی است که برای کمک به شناسایی طعمه، از یادگیری ماشینی، برنامههای رایانهای پیشرفته، نرمافزار شبکه عصبی و مدلهای رایانهای استفاده میکند.
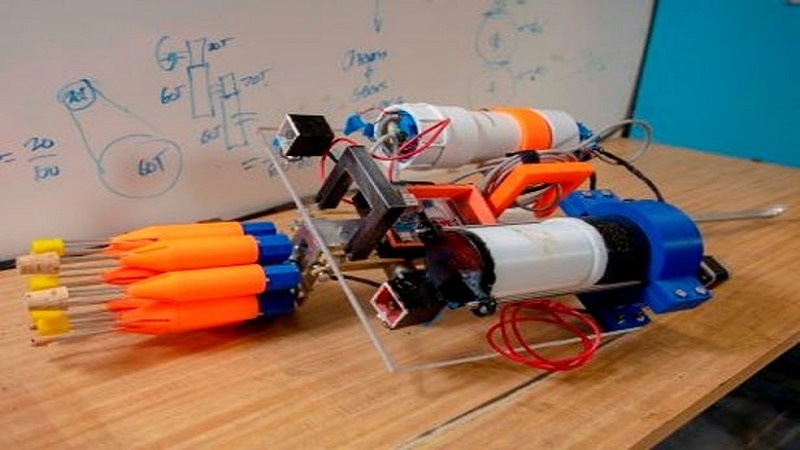
بخش دوم، نوعی ابزار نگهدارنده پیکان است که از یک سیلندر گردان با هشت پیکان شناور تشکیل میشود. با نزدیک شدن ربات به شیرماهی، یک محور فلزی، پیکان را به سوی آن پرتاب میکند. با جمع شدن محور، نوک پیکان جدا میشود و شیرماهی را به سطح آب میکشد.
"کریگ پوتنام"(Craig Putnam)، از پژوهشگران این بررسی گفت: هدف ما این است که ربات را در یک طرف قایقی قرار دهیم و آن را به طرف صخرههای مرجانی بفرستیم تا جستجو را آغاز کند. ربات باید هنگام عملیات، براساس یک الگوی جستجو کار کند.